
Description
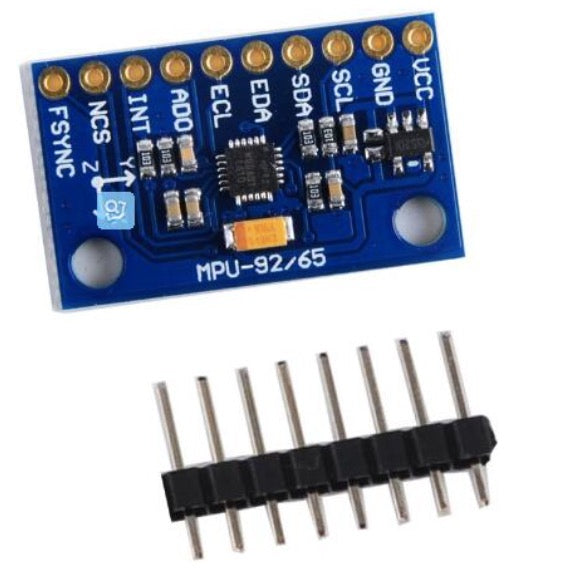
The MPU-9250 is a 9-axis MotionTracking device that combines a 3-axis gyroscope, 3-axis accelerometer, 3-axis magnetometer and a Digital Motion Processor™ (DMP) all in a small 3x3x1mm package available as a pin-compatible upgrade from the MPU-6515. With its dedicated I2C sensor bus, the MPU-9250 directly provides complete 9-axis MotionFusion™ output. The MPU-9250 MotionTracking device, with its 9-axis integration, on-chip MotionFusion™, and run-time calibration firmware, enables manufacturers to eliminate the costly and complex selection, qualification, and system level integration of discrete devices, guaranteeing optimal motion performance for consumers. MPU-9250 is also designed to interface with multiple non-inertial digital sensors, such as pressure sensors, on its auxiliary I2C port.
Documentation: GY-9250 datasheet
Features
- Three 16-bit analog-to-digital converters (ADCs) for digitizing the gyroscope outputs
- Three 16-bit ADCs for digitizing the accelerometer outputs
- Three 16-bit ADCs for digitizing the magnetometer outputs
- Gyroscope full-scale range of ±250, ±500, ±1000, and ±2000°/sec (dps)
- Accelerometer full-scale range of ±2g, ±4g, ±8g, and ±16g
- Magnetometer full-scale range of ±4800μT
- I2C and SPI serial interfaces
- Power supply: 3-5v
Applications
- TouchAnywhere™ technology (for “no touch” UI Application Control/Navigation)
- MotionCommand™ technology (for Gesture Short-cuts)
- Motion-enabled game and application framework
- Location based services, points of interest, and dead reckoning
- Handset and portable gaming
- Motion-based game controllers
- 3D remote controls for Internet connected DTVs and set top boxes, 3D mice
- Wearable sensors for health, fitness and sports
Wiring:

Connection:
Arduino of 5 V - Vcc of the MPU-9250
Arduino of GND - GND of the MPU-9250
Arduino of A4 - SDA of the MPU-9250
Arduino of A5 - SCL of the MPU-9250
Arduino Code:
To use the library, first download and install the MPU9250 into the Arduino IDE. After installation, include the library to sketch the code, also follow these way to get code from the library by clicking Files> Examples> MPU 9250> Calibration or you can also copy the below code to your IDE.
#include “MPU9250.h”
MPU9250 mpu;
void setup() {
Serial.begin(115200);
Wire.begin();
Delay(2000);
If (!mpu.setup(0x68)) { //change to your own address
while (1) {
Serial.println(“There was a problem connecting to MPU.
If you are not sure about your connection, please
check it with *connection_check*.”);
delay (5000);
}
}
//calibrate anytime you want to
Serial.println(“The device should not be moved from the flate plane.”);
Mpu.verbose(true);
delay(5000);
mpu.calibrateAccelGyro();
Serial.println(“Mag calibration will start in 5 sec.”);
Serial.println(“Wave the device in a figure eight until it is finished”);
delay(5000);
mpu.calibrateMag();
print_calibration();
mpu.verbose(false);
}
void loop(){
}
void print_calibration(){
Serial.println(“calibration parameters”);
Serial.println(“accel bias [g]: “);
Serial.print(mpu.getAccBiasX() * 1000.f / (float)MPU9250::CALIB_ACCEL_SENSITIVITY);
Serial.print(“,”);
Serial.print(mpu.getAccBiasZ() * 1000.f / (float)MPU9250::CALIB_ACCEL_SENSITIVITY);
Serial.println();
Serial.println(“gyro bias [deg/s]:”);
Serial.print(mpu.getGyroBiasX() / (float)MPU9250::CALIB_GYRO_SENSITIVITY);
Serial.print(“,”);
Serial.print(mpu.getGyroBiasY() / (float)MPU9250::CALIB_GYRO_SENSITIVITY);
Serial.print(“,”);
Serial.print(mpu.getGyroBiasZ() / (float)MPU9250::CALIB_GYRO_SENSITIVITY);
Serial.println();
Serial.println(“mag bias [mG]: “);
Serial.print(mpu.getMagBiasX());
Serial.print(“,”);
Serial.print(mpu.getMagBiasZ());
Serial.println();
Serial.println(“mag scale []:”);
Serial.print(mpu.getMagScaleY());
Serial.print(“,”);
Serial.print(mpu.getMagScaleZ());
Serial.println();
}